import numpy as np
from qiskit import QuantumCircuit
from qiskit_aer import AerSimulator
from qiskit.quantum_info import Operator
sim = AerSimulator()
from util import zero, one, draw_vecs
Appendix: Linear Algebra#
We’ll review the bare minimum of linear algebra needed for this series of notebooks. In particular, we will
introduce the concept of vectors as a data structure that encodes the quantum state of single and multi-qubit systems.
We will introduce matrices as a function that implements a quantum transformation.
Vectors#
From a programming perspective, we can think of a vector as a data structure (i.e., array) that has operations defined (\(+\), \(\cdot\)) on it satisfying certain properties (e.g., \(+\) and \(\cdot\) distribute).
Real Vectors#
vec1 = np.array([1., 2.]) # D = 2
vec1
array([1., 2.])
vec1[0], vec1[1]
(np.float64(1.0), np.float64(2.0))
draw_vecs([vec1])
vec2 = np.array([2.3, 1.4]) # D = 2
vec2
array([2.3, 1.4])
draw_vecs([vec2])
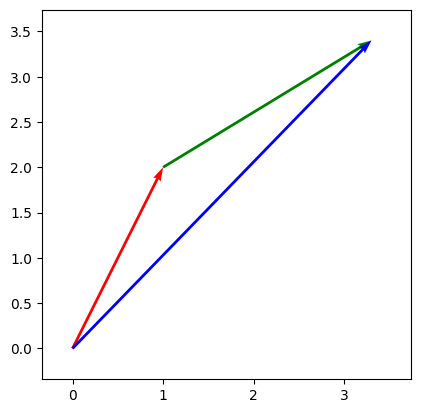
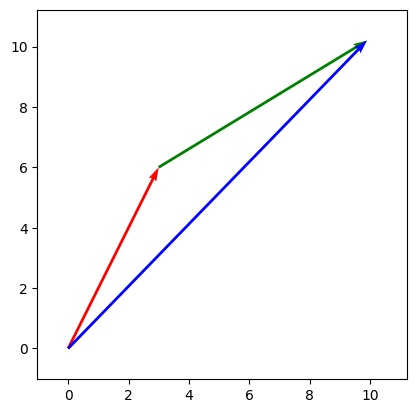
Operation 1: Vector Addition#
Vectors are a “data structure”.
The first operation we can perform on a vector is addition with another vector.
print("vec1", vec1)
print("vec2", vec2)
vec1 + vec2 # note the component-wise addition
vec1 [1. 2.]
vec2 [2.3 1.4]
array([3.3, 3.4])
draw_vecs([vec1, (vec1, vec2), vec1 + vec2])
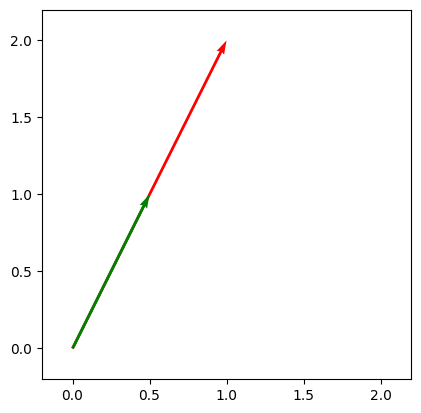
Operation 2: Scaling vector#
The second operation we can perform on a vector is scaling with a number.
print(vec1)
.5*vec1
[1. 2.]
array([0.5, 1. ])
draw_vecs([vec1, .5*vec1])
Properties#
Previously, we saw scaling and addition independently.
How do scaling and addition work with each other?
# 1: Multiplying first then adding
draw_vecs([3.*vec1, (3.*vec1, 3.*vec2), 3.*vec1 + 3.*vec2])
# 2: Adding then multiplying
draw_vecs([3.*vec1, (3.*vec1, 3.*vec2), 3.*(vec1 + vec2)])
Summary#
A vector is an array of numbers notated as
where \(x_i\) indicates the \(i\)-th number in the vector.
Operations#
Vector addition is defined element-wise as
Vector scaling is defined element-wise as
Properties#
Using the definition of addition and scaling, we can verify properties such as
distributivity: \(c(x + y) = cx + cy\)
associativity: \((x + y) + z= x + (y + z)\)
commutativity: \(x + y = y + x\)
Aside: “Abstract Method”#
In applied settings, we can largely work with vectors as arrays of numbers since we eventually hope to compute with them.
For theoretical purposes, we can think of vectors as any abstract set of elements that we can add and scale satisfying the rules above.
Dot Product and Orthogonality#
The dot product of two vectors \(x\) and \(y\) is defined as
np.dot([1., 2.], [2., 3.])
np.float64(8.0)
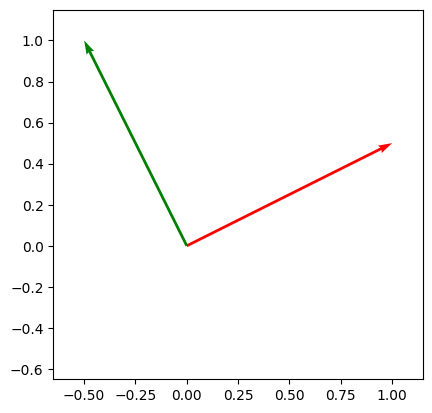
Orthogonality#
Two vectors \(x\) and \(y\) are said to be orthogonal if \(x \cdot y = 0\).
# Orthogonal
x = np.array([1.0, 0.5])
y = np.array([-.5, 1.])
print(np.dot(x, y))
draw_vecs([x, y])
0.0
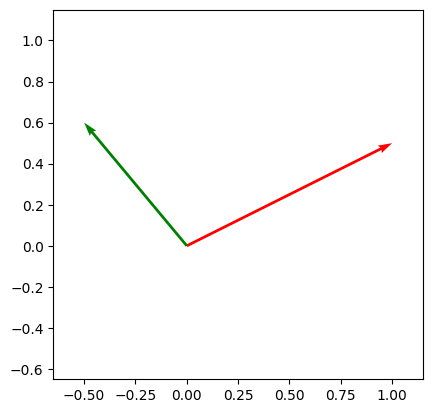
# Not Orthogonal
x = np.array([1.0, .5])
y = np.array([-.5, .6])
print(np.dot(x, y))
draw_vecs([x, y])
-0.2
Norm#
The euclidean norm measures the length of a vector.
np.linalg.norm(np.array([1., 2., 3.])), np.sqrt(1**2 + 2**2 + 3**2)
(np.float64(3.7416573867739413), np.float64(3.7416573867739413))
Dot Product and Angle#
Let \(\theta\) be the angle between \(x\) and \(y\). Then
Recall that two vectors are orthogonal when \(\cos(\theta) = 0\), which means that \(\theta\) is some integer multiple of \(\pi/2\) so that they are at “right angles”.
Complex Vectors#
ivec1 = np.array([1. + 1j, 2. - 3.1j]) # D = 2
ivec1
array([1.+1.j , 2.-3.1j])
ivec2 = np.array([- 1j, -2.]) # D = 2
ivec2
array([-0.-1.j, -2.+0.j])
Complex Vector Operations#
ivec1 + ivec2
array([1.+0.j , 0.-3.1j])
3j * ivec1
array([-3. +3.j, 9.3+6.j])
Complex Norm#
Let
Then
np.linalg.norm(ivec2), np.sqrt(ivec2[0] * np.conjugate(ivec2[0]) + ivec2[1] * np.conjugate(ivec2[1]))
(np.float64(2.23606797749979), np.complex128(2.23606797749979+0j))
A Qubit is a 2D Complex Vector#
Recall that a qubit was defined in terms of pairs of complex numbers
Thus a qubit can be equivalently defined as
Matrices#
Matrices are “functions” on vector data, i.e., the transform vectors into vectors.
Whereas we might write a typical function as code, matrices can be represented as a collection of numbers.
Real Matrices#
Example: 2x2 Matrix#
np.array([[1, 2], [3, 4]])
array([[1, 2],
[3, 4]])
Example: 2x3 Matrix#
np.array([[1, 2, 3], [4, 5, 6]])
array([[1, 2, 3],
[4, 5, 6]])
Example: nxm Matrix#
n = 3
m = 10
A = np.zeros((n, m))
A[2, 3] = 1
A
array([[0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 1., 0., 0., 0., 0., 0., 0.]])
Complex Matrices#
We can also have complex matrices
C = np.array([
[1j, -2],
[0, 3 + 2j]
])
C
array([[ 0.+1.j, -2.+0.j],
[ 0.+0.j, 3.+2.j]])
Matrix Multiplication: View 1#
print(vec1)
np.array([[1, 2], [3, 4]]) @ vec1
[1. 2.]
array([ 5., 11.])
np.array([[1, 2], [3, 4]]) @ np.array([[1, 2], [3, 4]])
array([[ 7, 10],
[15, 22]])
Matrix Multiplication: View 2#
Each column is a linear combination of the left matrix columns using the right matrix columns as the coefficients.
print(np.array([[1, 2], [3, 4]]) @ vec1)
print(np.array([1, 3]) * vec1[0] + np.array([2, 4]) * vec1[1])
[ 5. 11.]
[ 5. 11.]
print(np.array([[1, 2], [3, 4]]) @ np.array([[1, 2], [3, 4]]))
np.concatenate([(np.array([1, 3]) * 1 + np.array([2, 4]) * 3).reshape(2, -1),
(np.array([1, 3]) * 2 + np.array([2, 4]) * 4).reshape(2, -1)], axis=1)
[[ 7 10]
[15 22]]
array([[ 7, 10],
[15, 22]])
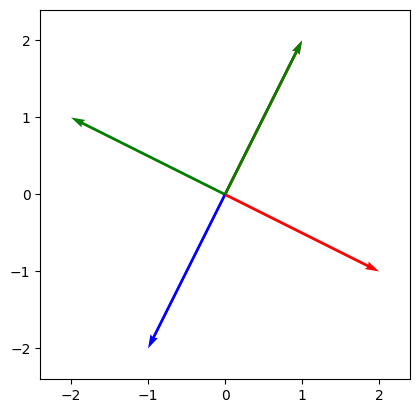
Matrix Multiplication is Linear#
This means that
for any matrix \(A\), constant \(c\), and vectors \(x\) and \(y\).
def rotation_matrix(angle):
theta = angle * np.pi/180
R = np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]
]) # 2x2 matrix
return R
R = rotation_matrix(90)
R @ (2 * (vec1 + vec2)), 2 * R @ vec1 + 2 * R @ vec2
(array([-6.8, 6.6]), array([-6.8, 6.6]))
Matrix Multiplication can be Sequenced#
We can read the matrix multiplications
as
Apply \(A\) to \(x\)
Then apply \(B\) to the result of \(Ax\).
draw_vecs([vec1, R @ vec1 , R @ R @ vec1, R @ R @ R @ vec1, R @ R @ R @ R @ vec1])
Matrix Inverse#
\(A^{-1}\) is called the inverse of \(A\) if
where \(I\) is an identity matrix, i.e., a matrix with 1s on the diagonal and 0s everywhere else.
Not every matrix has an inverse!
Interpretation of inverse of A: if A applies a linear transformation, then \(A^{-1}\) undoes the transformation done by \(A\), since \(A^{-1}A\) is the identity which is the linear transformation that does nothing.
R30 = rotation_matrix(30)
R30
array([[ 0.8660254, -0.5 ],
[ 0.5 , 0.8660254]])
np.linalg.inv(R30), np.linalg.inv(R30) @ R30
(array([[ 0.8660254, 0.5 ],
[-0.5 , 0.8660254]]),
array([[1.00000000e+00, 7.43708407e-18],
[6.29482353e-17, 1.00000000e+00]]))
# Inverse of rotation matrix is rotation in other direction
np.linalg.inv(R30), rotation_matrix(-30)
(array([[ 0.8660254, 0.5 ],
[-0.5 , 0.8660254]]),
array([[ 0.8660254, 0.5 ],
[-0.5 , 0.8660254]]))
draw_vecs([vec1, R30 @ vec1, np.linalg.inv(R30) @ vec1])
Quantum gates on single qubit systems are 2x2 Unitary Matrices#
The unitary matrix
encodes the Hadamard gate. We’ll characterize unitary matrix later.
qc_H = QuantumCircuit(1)
qc_H.h(0)
qc_H.draw()
┌───┐ q: ┤ H ├ └───┘
# This produces the unitary matrix
Operator(qc_H)
Operator([[ 0.70710678+0.j, 0.70710678+0.j],
[ 0.70710678+0.j, -0.70710678+0.j]],
input_dims=(2,), output_dims=(2,))
Application of gate to qubit is matrix multiplication#
(zero.evolve(Operator(qc_H))).draw('latex')
np.array(Operator(qc_H)) @ np.array(zero)
array([0.70710678+0.j, 0.70710678+0.j])
(one.evolve(Operator(qc_H))).draw('latex')
np.array(Operator(qc_H)) @ np.array(one)
array([ 0.70710678+0.j, -0.70710678+0.j])
Sequencing gates corresponds to matrix multiplication#
qc_H2 = QuantumCircuit(1)
qc_H2.h(0)
qc_H2.h(0)
qc_H2.draw()
┌───┐┌───┐ q: ┤ H ├┤ H ├ └───┘└───┘
Operator(qc_H2)
Operator([[1.+0.j, 0.+0.j],
[0.+0.j, 1.+0.j]],
input_dims=(2,), output_dims=(2,))
Operator(qc_H) @ Operator(qc_H)
Operator([[ 1.00000000e+00+0.j, -2.23711432e-17+0.j],
[-2.23711432e-17+0.j, 1.00000000e+00+0.j]],
input_dims=(2,), output_dims=(2,))
np.allclose(Operator(qc_H2), Operator(qc_H) @ Operator(qc_H))
True
Unitary matrix properties#
Unitary matrices have two properties that are important for quantum computing.
Every unitary matrix is invertible. This coincides with our intuition in the single qubit case that every quantum operation on the Bloch sphere should be reversible.
Every unitary matrix preserves the norm of the input vector. In symbols,
This means that applying a quantum gate to a single qubit produces an output that is also a qubit.
# This demonstrates that H is its own inverse
Operator(qc_H) @ Operator(qc_H)
Operator([[ 1.00000000e+00+0.j, -2.23711432e-17+0.j],
[-2.23711432e-17+0.j, 1.00000000e+00+0.j]],
input_dims=(2,), output_dims=(2,))
# This demonstrates that H preserves the norm
np.linalg.norm(zero), np.linalg.norm(np.array(Operator(qc_H)) @ np.array(zero))
(np.float64(1.0), np.float64(0.9999999999999999))
Summary#
We had a crash course on linear algebra today and tied it back to the single qubit case
These concepts will be used throughout the course.
Next time, we will use linear algebra to begin to talk about multi-qubit systems.